

昆山五轴机械手做出来的产品质量怎样?
文章出处:本站 人气:6947 发表时间:2022-05-30 10:54:54
五轴机械手的手部是用来直接抓取注塑制品的部件。由于注塑制品的形状,大小,重量及表面特征等方面存在着差异,因此五轴机械手的手部有多种形式,一般可分为夹持式和吸附式两种。夹持式手部的主要形式为夹钳式,常用于抓取不易破碎或变形的制品,它对所抓取的制品的形状有较大的适应性。夹持式手部由手指,传动机构和驱动装置组成。
对于夹持式手部,进行五轴机械手设计选用时主要考虑以下几点。
(1)手部应具有适应的夹紧力和驱动。
(2)手指应具有足够的开关范围。
(3)手指对制品应具有一定的夹持精度。
(4)手部对制品应具有一定的适应能力,且要求手部能耐受注塑制品刚从模腔中取出时的高温及腐蚀性。

每当五轴机械手的出现异常的话我,我们就应该要对其进行检查,在问题出现时就应该要解决,否则对机器的日后寿命大大的降低。
1、五轴机械手比例线性差,开合模时间位置压力流量调节不良,检查参数中斜升斜降,调整参数中的斜升斜降。
2、锁模机铰润滑不良,检查哥林柱,二板滑脚,机铰润滑情况, 加大润滑,增加打油次数。
3、模具锁模力过大,检查模具受力时锁模力情况,视用户产品情况减少锁模力。检查时间位置是否合适。
4、头二板平行度偏差,检查头板二板平行度。调整二板,头板平行误差。
5、慢速转快速开模设定位置过小,速度过快。检查慢速开模转快速开模位置是否恰当,慢速开模速度是否过快。加长慢速开模位置,降低五轴机械手慢速开模的速度。

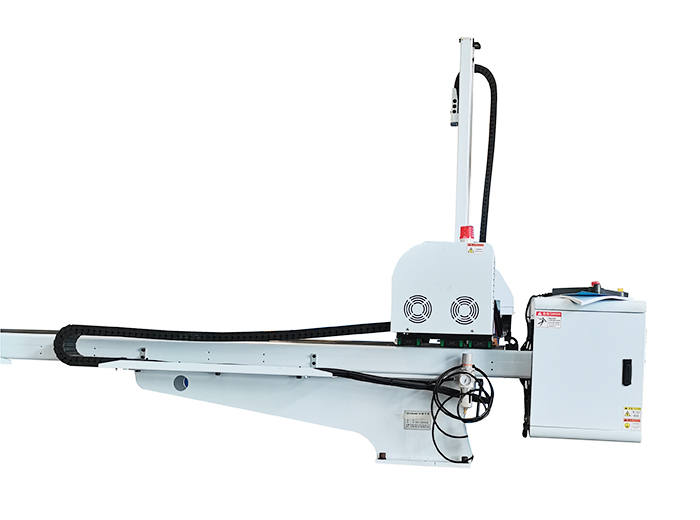
五轴机械手手臂的组成:
(1)运动元件。如油缸、气缸、齿条、凸轮等是驱动手臂运动的部件。
(2)导向装置。是保证手臂的正确方面及承受由于工件的重量所产生的弯曲和扭转的力矩。
(3)手臂。起着连接和承受外力的作用。手臂上的零部件,如油缸、导向杆、控制件等都安装在手臂上。
此外,根据五轴机械手运动和工作的要求,如管路、冷却装置、行程定位装置和自动检测装置等,一般也都装在手臂上。所以手臂的结构、工作范围、承载能力和动作精度都直接影响五轴机械手的工作性能。

五轴机械手主要由执行机构、驱动机构和控制系统三大部分组成。
那你知道它的驱动机构有那些吗,我们来看看。他们都是有那些作用呢。
五轴机械手的执行机构分为手部、手臂、躯干;
3、躯干躯干是安装手臂、动力源和各种执行机构的支架。
1、手部:手部安装在手臂的前端。手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。
五轴机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的最多。
可根据夹持对象的形状和大小配备多种形状和大小的夹头以适应操作的需要。所谓没有手指的手部,一般都是指真空吸盘或磁性吸盘。
2、手臂:手臂的作用是引导手指准确地抓住工件,并运送到所需的位置上。
为了使五轴机械手能够正确地工作,手臂的3个自由度都要精确地定位。
五轴机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。五轴机械手的控制分为点位控制和连续轨迹控制两种。
控制系统可根据动作的要求,五轴机械手设计采用数字顺序控制。它首先要编制程序加以存储,然后再根据规定的程序,控制五轴机械手进行工作程序的存储方式有分离存储和集中存储两种。
分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等。
这种方式使用于顺序、位置、时间、速度等必须同时控制的场合,即连续控制的情况下使用。
五轴机械手的特点:
1、安装简单:立柱式结构,可连接齿轮冲床、气动冲床及各种油压机;
2、全面满足冲床自动上下料需求:可根据冲床高度、送料高度、下料高度自动适应;
3、傻瓜式操作:冲压自动化机械手采用示教模式规划运动轨迹,简单易用;
4、量身订制解决方案:依客户的个性化需求,量身订制较好解决方案,避免客户错误的设备投资;
5、应用广泛:吨位冲床、各种高度的机台均可使用,多角度实现各种复杂冲压动作,如翻转、打废料、侧挂或斜放、堆料等。
- 上一篇: 嘉兴码垛机械手如何进行更好的系统控制?
- 下一篇: 上海气动机械手作用有哪些?




